Next: Mass Transit System Structure Up: Multimodal Mass Transit Simulation Previous: Framework Capabilities Contents
This section describes the pathway from high-level goals to specific use-cases for the transit system, the mass transit optimization goals, fleet schedule optimization objectives, and transit use cases.
This simulation constructs a simple transit network with passengers traveling from source nodes to destination nodes. The scheduler attempts to provide an optimal or quasi-optimal schedule of transit fleet vehicles with various capacities, operating costs, and nodes serviced that will transfer the passengers to their final destination. Through parametric analysis of different demand loading and network topologies, we hope to define some characteristics of urban areas that enable the system to meet the opposing passenger demand and vehicle utilization objectives efficiently.
The objective function of the transit vehicle schedule optimization is a weighted composite of the number of passengers served, the time they are delivered, and a flat cost incurred per vehicle leg traveled. The weight on each objective typically puts them on different orders of magnitude, such that a secondary objective should not be considered a factor until the primary objective reaches an optimal configuration.
The relative weighting of objectives is arranged as follows:
The objective function is subject to the following constraints:
We could add some arbitrary constraints somewhat easily. For instance,
we could limit the maximum number of vehicles on a group of segments or
waypoints that have been grouped together to block each other on a
constrained resource, such a bottle-necked intersection. This concept
is discussed in more detail in Section ![]() .
.
This optimization make no attempt to handle meeting passenger required times of arrival (RTA). It only optimizes based on the reported time passengers first become available to depart. Oftentimes people would want to arrive at their destination just before the fixed start of their work day, or at an airport in time to catch a flight. Because this optimizer uses an inventory management approach, adding this information would result in an exponential increase in decision variables. This added complexity would make the schedule take much longer to generate. Combined with the fact that several of the passengers would not even make use of this functionality (such as the ones who are leaving work and just want to get to their destination as soon as possible), the schedule optimizer declines to consider this constraint.
To add an RTA handling feature, an algorithm external to this schedule optimizer would need to provide a rough estimate of the required time of departure (RTD) necessary to meet a passenger's RTA, and submit a transit request with that RTD into the optimization. If the itinerary provided back to the passenger falls behind (or too far ahead) of their desired arrival time, the algorithm could redact the transit request and try again with a slightly adjusted RTD. A few cycles of this incremental optimization on a much simpler schedule optimizer for the subset of passengers who actually need it should provide an acceptable solution more quickly than if the scheduling problem was reformulated to include variables and objectives to take everyone's RTAs into account.
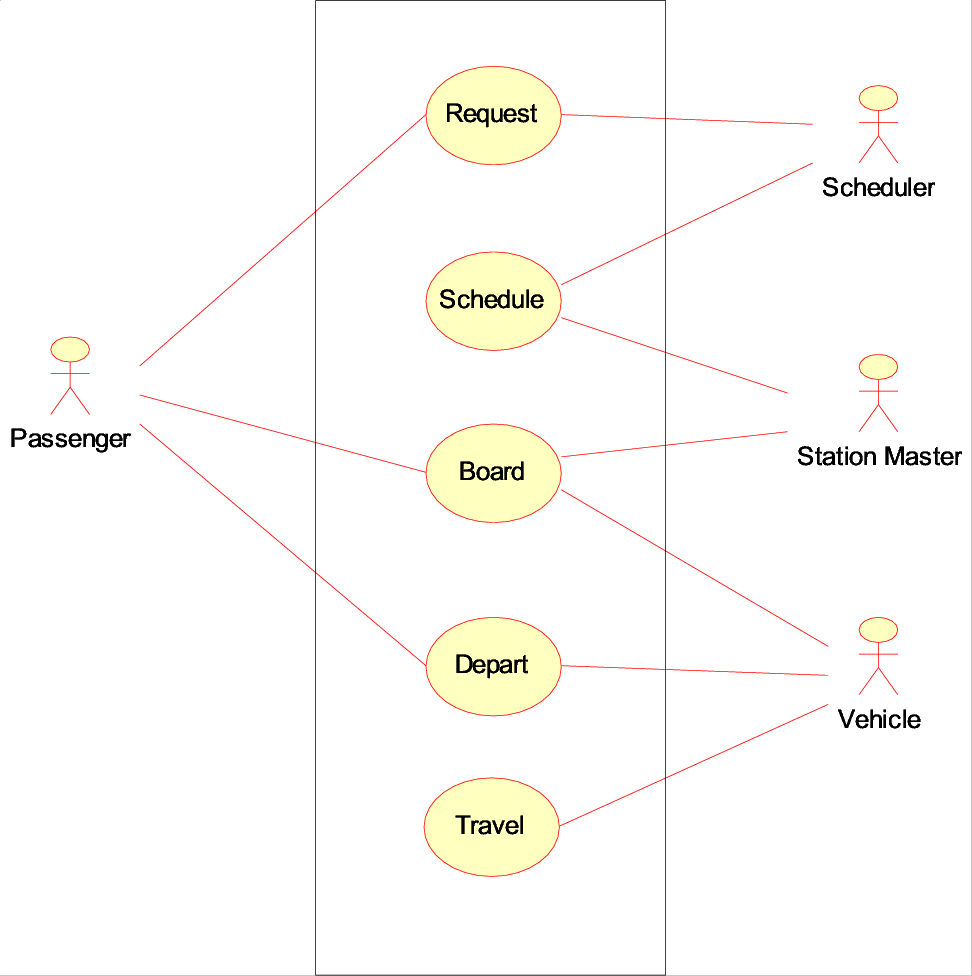
A passenger begins by submitting a transit request for sometime in the future to the global scheduler. The scheduler collects requests and generates an optimized vehicle schedule that separates passengers into several pools based on their current and final destination node. When the time comes to act upon the schedule, a station master at each station loads waiting passengers into the proper vehicle, and then sends the vehicles on their way towards their next destination. When the passenger reaches their final destination, they exit the transit system.
For simplicity, this simulation unboards all passengers at each station so the station master can re-sort them into their next/final destination pools. Another logistics layer could be implemented to provide the convenience of maximizing the number of passengers that could stay aboard their vehicles during stops at transfer stations.
Rowin Andruscavage 2007-05-22